Robonaut 2 !!!
Robonaut is a humanoid robotic development project run from the Dextrous Robotics Laboratory at NASA's Johnson Space Center in Houston, TX. Robonaut is a different class of robot than other current space
Robonaut is a humanoid robotic development project run from the Dextrous Robotics Laboratory at NASA's Johnson Space Center in Houston, TX. Robonaut is a different class of robot than other current space
{kind=link}

The core idea behind the Robonaut series of robots is to have a humanoid machine work alongside astronauts. Its form factor and dexterity are designed such that Robonaut can use space tools and work in similar environments to suited astronauts.
The latest Robonaut version, R2, is slated to be delivered by Discovery Space Shuttle , on mission STS-133, to the ISS which is scheduled on 4th of November 2010 and subsequently tested "in-doors".Almost 200 people from 15 countries have visited the International Space Station, but the orbiting complex has so far only ever had human crew members – until now.
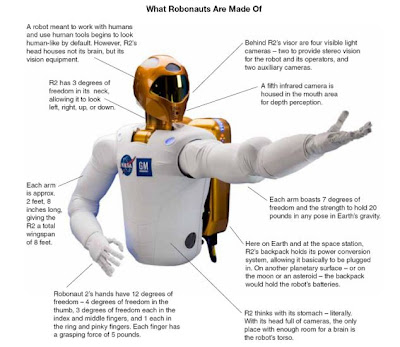
R2'S SPECIFICATIONS

Materials: Primarily aluminium with steel, and other nonmetallics
Weight: 23 1/2 stone
Weight: 23 1/2 stone
Height: 3 feet, 4 inches (from waist to head)
Shoulder width: 2 feet, 7 inches
Sensors: 350+, total
Processors: 38 Power PC Processors
Degrees of freedom: 42, total
Speed: Up to 7 feet per sec
What is a Robonaut?
A Robonaut is a dexterous humanoid robot built and designed at NASA Johnson Space Center in Houston, Texas. Our challenge is to build machines that can help humans work and explore in space.

Working side by side with humans, or going where the risks are too great for people, Robonauts will expand our ability for construction and discovery.Central to that effort is a capability we call dexterous manipulation, embodied by an ability to use one's hand to do work, and our challenge has been to build machines with dexterity that exceeds that of a suited astronaut. There are currently four Robonauts, with others currently in development. This allows us to study various types of mobility, control methods, and task applications. The value of a humanoid over other designs is the ability to use the same workspace and tools - not only does this improve efficiency in the types of tools, but also removes the need for specialized robotic connectors. Robonauts are essential to NASA's future as we go beyond low earth orbit and continue to explore the vast wonder that is space.

Robonaut 2 or R2, will launch to the International Space Station on space shuttle Discovery as part of the STS-133 mission, it will become the first dexterous humanoid robot in space, and the first US-built robot at the space station. But that will be just one small step for a robot and one giant leap for robot-kind.In the current iteration of Robonaut, Robonaut 2 or R2, NASA and General Motors are working together to accelerate development of the next generation of robots and related technologies for use in the automotive and aerospace industries.
Robonaut 2 (R2) is a state of the art highly dexterous anthropomorphic robot. Like its predecessor Robonaut 1 (R1), R2 is capable of handling a wide range of EVA tools and interfaces, but R2 is a significant advancement over its predecessor. R2 is capable of speeds more than four times faster than R1, is more compact, is more dexterous, and includes a deeper and wider range of sensing. Advanced technology spans the entire R2 system and includes: optimized overlapping dual arm dexterous workspace, series elastic joint technology, extended finger and thumb travel, miniaturized 6-axis load cells, redundant force sensing, ultra-high speed joint controllers, extreme neck travel, and high resolution camera and IR systems.
The dexterity of R2 allows it to use the same tools that astronauts currently use and removes the need for specialized tools just for robots.One advantage of a humanoid design is that Robonaut can take over simple, repetitive, or especially dangerous tasks on places such as the International Space Station. Because R2 is approaching human dexterity, tasks such as changing out an air filter can be performed without modifications to the existing design.Another way this might be beneficial is during a robotic precursor mission.

Click this link to see the R2 in action !!!
R2 would bring one set of tools for the precursor mission, such as setup and geologic investigation. Not only does this improve efficiency in the types of tools, but also removes the need for specialized robotic connectors. Future missions could then supply a new set of tools and use the existing tools already on location.
No comments:
Post a Comment