The World’s Fastest Supercomputer Now Belongs to China !!!
A new supercomputer built in China is poised to take the number one spot in the twice-yearly Top 500 list of the world’s fastest supercomputers scheduled to be released in November.
Previously ranked
seventh when the index was last released in June, China’s
Tianhe-1A can now reach sustained performance levels of
2.507 petaflops –
43 percent faster than any other known supercomputer.
In fact, the Tianhe-1A was not even the fastest supercomputer in China in the last Top 500 list. That award went to the country’s Nebulae supercomputer based in Shenzhen, which recorded performance levels of 1.271 petaflops, a surprise second in the global index trailing only the U.S.-based
Cray Jaguar system’s 1.75 petaflops.The ultra-fast Tianhe-1A computing system, designed by China’s National University of Defense Technology and located at the National Supercomputing Center in Tianjin, generates its power from
7,168 Nvidia Tesla M2050 graphics processing units and 14,336 Intel chips. It has the computing power equivalent of
175,000 laptops and is three times more power efficient than current systems, according to Nvidia, which has already dubbed it “the fastest system in China and in the world today.”
In addition, the supercomputer has a theoretical performance of
4.669 petaflops when all its graphics processing units are operational, according to a Nvidia spokesman.
“I don’t know of another system that is going to be anywhere near the performance and the power of this machine,” said Jack Dongarra, a U.S. supercomputer expert who has overseen the Top 500 index since it was first established in 1993 and who inspected China’s new system in Tianjin last week. “It is quite impressive.”
China will utilize the Tianhe-1A as an
“open access” system, available to other countries and organizations to use for large scale scientific projects and computations, according to Ujesh Desai, Nvidia’s vice president of product marketing.
Supercomputers are used for complex research simulations covering climate change modeling, genomics, seismic imaging, military design and code breaking.Configuration :GPU : 7,168 Nvidia Tesla M2050 GPUs
CPU : 14,336 Intel Xeon CPUs.
It cost $88 million;
Its 103 cabinets weigh 155 tons,
and the entire system
consumes 4.04 megawatts of electricity.
Tianhe-1A ousted the previous record holder,
Cray XT5 Jaguar, which is used by the
U.S. National Center for Computational Sciences at Oak Ridge National Laboratories. It is powered by
224,162 Opteron CPUs and achieves a performance record of
1.75 petaflops.
Tianhe - 1A Supercomputer
A supercomputer is a computer that is at the frontline of current processing capacity, particularly speed of calculation. Supercomputers were introduced in the 1960s and were designed primarily by Seymour Cray at Control Data Corporation (CDC), which led the market into the 1970s until Cray left to form his own company, Cray Research. He then took over the supercomputer market with his new designs, holding the top spot in supercomputing for five years (1985–1990). In the 1980s a large number of smaller competitors entered the market, in parallel to the creation of the minicomputer market a decade earlier, but many of these disappeared in the mid-1990s "supercomputer market crash".
Today, supercomputers are typically one-of-a-kind custom designs produced by "traditional" companies such as Cray, IBM and Hewlett-Packard, who had purchased many of the 1980s companies to gain their experience. As of May 2010, the Cray Jaguar is the fastest supercomputer in the world.
The term supercomputer itself is rather fluid, and today's supercomputer tends to become tomorrow's ordinary computer. CDC's early machines were simply very fast scalar processors, some ten times the speed of the fastest machines offered by other companies. In the 1970s most supercomputers were dedicated to running a vector processor, and many of the newer players developed their own such processors at a lower price to enter the market. The early and mid-1980s saw machines with a modest number of vector processors working in parallel to become the standard. Typical numbers of processors were in the range of four to sixteen. In the later 1980s and 1990s, attention turned from vector processors to massive parallel processing systems with thousands of "ordinary" CPUs, some being off the shelf units and others being custom designs. Today, parallel designs are based on "off the shelf" server-class microprocessors, such as the PowerPC, Opteron, or Xeon, and coprocessors like NVIDIA Tesla GPGPUs, AMD GPUs,IBM Cell, FPGAs. Most modern supercomputers are now highly-tuned computer clusters using commodity processors combined with custom interconnects.
Supercomputers are used for highly calculation-intensive tasks such as problems involving quantum physics, weather forecasting, climate research, molecular modeling (computing the structures and properties of chemical compounds, biological macromolecules, polymers, and crystals), physical simulations (such as simulation of airplanes in wind tunnels, simulation of the detonation of nuclear weapons, and research into nuclear fusion). A particular class of problems, known as Grand Challenge problems, are problems whose full solution requires semi-infinite computing resources.
Relevant here is the distinction between capability computing and capacity computing, as defined by Graham et al. Capability computing is typically thought of as using the maximum computing power to solve a large problem in the shortest amount of time. Often a capability system is able to solve a problem of a size or complexity that no other computer can.Capacity computing in contrast is typically thought of as using efficient cost-effective computing power to solve somewhat large problems or many small problems or to prepare for a run on a capability system.
Supercomputer challenges, technologies
- A supercomputer generates large amounts of heat and must be cooled. Cooling most supercomputers is a major HVAC problem.
- Information cannot move faster than the speed of light between two parts of a supercomputer. For this reason, a supercomputer that is many meters across must have latencies between its components measured at least in the tens of nanoseconds. Seymour Cray's supercomputer designs attempted to keep cable runs as short as possible for this reason, hence the cylindrical shape of his Cray range of computers. In modern supercomputers built of many conventional CPUs running in parallel, latencies of 1–5 microseconds to send a message between CPUs are typical.
- Supercomputers consume and produce massive amounts of data in a very short period of time. According to Ken Batcher, "A supercomputer is a device for turning compute-boundproblems into I/O-bound problems." Much work on external storage bandwidth is needed to ensure that this information can be transferred quickly and stored/retrieved correctly.
Technologies developed for supercomputers include:
- Vector processing
- Liquid cooling
- Non-Uniform Memory Access (NUMA)
- Striped disks (the first instance of what was later called RAID)
- Parallel file systems.
The fastest supercomputers today
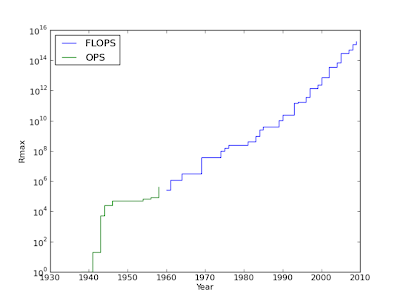
In general, the speed of a supercomputer is measured in "FLOPS" (FLoating Point Operations Per Second), commonly used with an SI prefixsuch as tera-, combined into the shorthand "TFLOPS" (1012 FLOPS, pronounced teraflops), or peta-, combined into the shorthand "PFLOPS" (1015 FLOPS, pronounced petaflops.) This measurement is based on a particular benchmark, which does LU decomposition of a large matrix. This mimics a class of real-world problems, but is significantly easier to compute than a majority of actual real-world problems.
"Petascale" supercomputers can process one quadrillion (1015) (1000 trillion) FLOPS. Exascale is computing performance in the exaflops range. An exaflop is one quintillion (1018) FLOPS (one million teraflops).
Timeline of supercomputers
| Year | Supercomputer | Peak speed
(Rmax) | Location |
|---|
| 1938 | Zuse Z1 | 1 OPS | Konrad Zuse, Berlin, Germany |
| 1941 | Zuse Z3 | 20 OPS | Konrad Zuse, Berlin, Germany |
| 1943 | Colossus 1 | 5 kOPS | Post Office Research Station, Bletchley Park, UK |
| 1944 | Colossus 2 (Single Processor) | 25 kOPS | Post Office Research Station, Bletchley Park, UK |
| 1946 | Colossus 2 (Parallel Processor) | 50 kOPS | Post Office Research Station, Bletchley Park, UK |
| 1946 | UPenn ENIAC
(before 1948+ modifications) | 5 kOPS | Department of War
Aberdeen Proving Ground, Maryland, USA |
| 1954 | IBM NORC | 67 kOPS | Department of Defense
U.S. Naval Proving Ground, Dahlgren, Virginia, USA |
| 1956 | MIT TX-0 | 83 kOPS | Massachusetts Inst. of Technology, Lexington, Massachusetts, USA |
| 1958 | IBM AN/FSQ-7 | 400 kOPS | 25 U.S. Air Force sites across the continental USA and 1 site in Canada (52 computers) |
| 1960 | UNIVAC LARC | 250 kFLOPS | Atomic Energy Commission (AEC)
Lawrence Livermore National Laboratory, California, USA |
| 1961 | IBM 7030 "Stretch" | 1.2 MFLOPS | AEC-Los Alamos National Laboratory, New Mexico, USA |
| 1964 | CDC 6600 | 3 MFLOPS | AEC-Lawrence Livermore National Laboratory, California, USA |
| 1969 | CDC 7600 | 36 MFLOPS |
| 1974 | CDC STAR-100 | 100 MFLOPS |
| 1975 | Burroughs ILLIAC IV | 150 MFLOPS | NASA Ames Research Center, California, USA |
| 1976 | Cray-1 | 250 MFLOPS | Energy Research and Development Administration (ERDA)
Los Alamos National Laboratory, New Mexico, USA (80+ sold worldwide) |
| 1981 | CDC Cyber 205 | 400 MFLOPS | (~40 systems worldwide) |
| 1983 | Cray X-MP/4 | 941 MFLOPS | U.S. Department of Energy (DoE)
Los Alamos National Laboratory; Lawrence Livermore National Laboratory; Battelle; Boeing |
| 1984 | M-13 | 2.4 GFLOPS | Scientific Research Institute of Computer Complexes, Moscow, USSR |
| 1985 | Cray-2/8 | 3.9 GFLOPS | DoE-Lawrence Livermore National Laboratory, California, USA |
| 1989 | ETA10-G/8 | 10.3 GFLOPS | Florida State University, Florida, USA |
| 1990 | NEC SX-3/44R | 23.2 GFLOPS | NEC Fuchu Plant, Fuchū, Tokyo, Japan |
| 1993 | Thinking Machines CM-5/1024 | 59.7 GFLOPS | DoE-Los Alamos National Laboratory; National Security Agency |
| Fujitsu Numerical Wind Tunnel | 124.50 GFLOPS | National Aerospace Laboratory, Tokyo, Japan |
| Intel Paragon XP/S 140 | 143.40 GFLOPS | DoE-Sandia National Laboratories, New Mexico, USA |
| 1994 | Fujitsu Numerical Wind Tunnel | 170.40 GFLOPS | National Aerospace Laboratory, Tokyo, Japan |
| 1996 | Hitachi SR2201/1024 | 220.4 GFLOPS | University of Tokyo, Japan |
| Hitachi/Tsukuba CP-PACS/2048 | 368.2 GFLOPS | Center for Computational Physics, University of Tsukuba, Tsukuba, Japan |
| 1997 | Intel ASCI Red/9152 | 1.338 TFLOPS | DoE-Sandia National Laboratories, New Mexico, USA |
| 1999 | Intel ASCI Red/9632 | 2.3796 TFLOPS |
| 2000 | IBM ASCI White | 7.226 TFLOPS | DoE-Lawrence Livermore National Laboratory, California, USA |
| 2002 | NEC Earth Simulator | 35.86 TFLOPS | Earth Simulator Center, Yokohama, Japan |
| 2004 | IBM Blue Gene/L | 70.72 TFLOPS | DoE/IBM Rochester, Minnesota, USA |
| 2005 | 136.8 TFLOPS | DoE/U.S. National Nuclear Security Administration,
Lawrence Livermore National Laboratory, California, USA |
| 280.6 TFLOPS |
| 2007 | 478.2 TFLOPS |
| 2008 | IBM Roadrunner | 1.026 PFLOPS | DoE-Los Alamos National Laboratory, New Mexico, USA |
| 1.105 PFLOPS |
| 2009 | Cray Jaguar | 1.759 PFLOPS | DoE-Oak Ridge National Laboratory, Tennessee, USA
|
2010 Tianhe-1A 2.507 PFLOPS National University of Defense Technology (NUDT) in China








 Mozilla Labs has been working hard on browser-based audio and video — not just for playback, but also for recording. Labs’ newest creation, called Rainbow, lets developers access your hardware’s video and audio recording capabilities with a few lines of JavaScript.
Mozilla Labs has been working hard on browser-based audio and video — not just for playback, but also for recording. Labs’ newest creation, called Rainbow, lets developers access your hardware’s video and audio recording capabilities with a few lines of JavaScript.



{kind=link}